电阻
电容
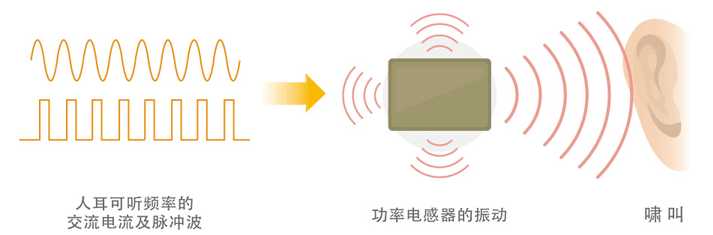
电感
三极管
be之间加下拉电阻确保两态
MOS管
进阶与选型
Vgsth 开始打开的电压
Idss 静态关断电流
Igss 静态栅极电流
Rdson 导通电阻
Gfs 跨导,与电阻成反比
Qg 总门极电荷,决定了打开速度(越小,打开速度越快
Qgs 门源电荷
Qgd
Ear 重复雪崩能量,在这个值以下管子不会坏
Tj 在不工作的情况下的存储温度
td 打开关闭延迟时间
tr 漏源上升时间
tf 漏源下降时间
正常情况下
Cgd=Crss,米勒电容,
Cgs=Ciss,输入电容
Cds=Coss,输出电容

电流在 t0-t1 无损耗
t1-t2 有损耗
t2-t3 有损耗,P损=Vds * Id
t3 有损耗(导通损耗),P损=Id * Rdson
MOS 四大损耗:打开损耗、关断损耗、导通损耗、续流损耗
开关损耗:由于 MOS 在打开期间,既有电压又有电流,存在打开损耗;关断损耗同理。发生在开关期间,频率越高损耗越大,开关损耗由米勒平台时间决定。平台宽度不要低于 90ns。压缩米勒平台时间可以降低开关损耗,
增大 Igs 可以减少开关损耗:减少栅极电阻;提高栅极驱动能力;提高栅极驱动电压
续流损耗:不是所有的都有(裂变桥),由续流电流决定损耗,可以在外部并联一个二极管分摊发热
米勒电容与漏记电压有关系电压越高,受米勒电容影响越大,导通的时候容易出问题(dv/dt)
米勒电容与漏记电压有关系电压越低,受 Id 影响大,关断的时候容易出问题(di/dt)
ds 的变化通过米勒电容反馈到栅极,影响驱动波形
Vgs 震荡:Cgs Cgd Id Vd 驱动电流 Layout 回路电感 MOS电感
MOS管同样可以串并联,并联后Cgs变大
Cgs小开关快,Cgs大开关慢
GS之间给下拉电阻确保关断,可以选10k-100K
把 DS 短路,G 接 AC,Ciss=Cgd+Cgs
把 GS 短路,G 接 AC,Coss=Cgd+Cds
S 接地,D 接 AC,Crss 随着漏极电容的升高而降低
米勒效应
在此时刻,G 电流从 Cgd 走到 S,MOS处于放大状态
栅极的电压与漏极电流保持一个比例关系
G 电压保持不变,D 电流也保持不变
管子在开关的过程中都要经过放大区间
很多管子都在这个放大区间坏
电流会滞后于电压是因为电流探头精度低
高压管栅极电阻:100-330R,200ns-1us
过小平台短发热短,米勒平台短,但易震荡,结果发热更大
过大容易过EMC,不容易震荡,谐波分量小
低压管栅极电阻:10R-100R,90ns-300ns,具体时间要看Vgs是否震荡
平台宽,波形好,发热量大
平台窄,波形不好,受到(产生)干扰,发热更大
基波:标准的正弦波
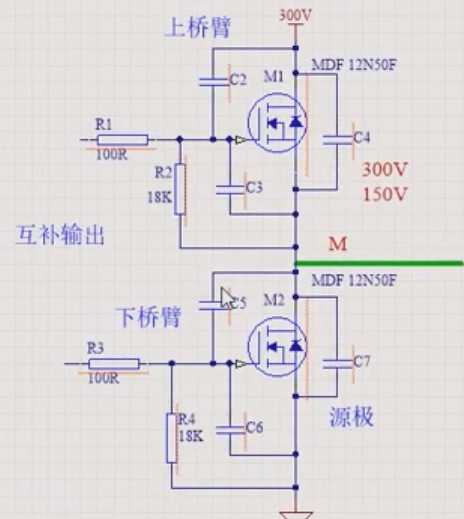
在桥式电路中:
在上管导通下管关闭的瞬间,上管的 S 端突然得到高电压,有可能会让下管的 GS 波形通过 Cgd 得到一个高电压,导致下管误导通。
减少误触发的因素:控制信号与Id回路、GND 平面的干扰、GS 阻抗、换一个 MOS(选高Vth的管子)
可以通过减少 G 对 GND 电阻,降低误导通的可能